全身外骨骼机器人FIT-GS UItra是傲鲨智能在专业版产品基础上衍生而来,旨在推动外骨骼机器人行业技术发展与拓展更多场景落地应用,专门提供给大学、科研机构、医疗科研等开展二次开发研究。
点击查看FIT-GS UItra介绍手册(PDF文件)>单块最高
2~4 电池续航时间
便携式嵌入锂电池
总共
32 个通道
足底压力
重量
25 kg
设备自重
自由度
16 个
6个主动自由度,10个被动自由度
温差
-20-50 ℃
环境温度最大范围
交互控制
DIU
数字便捷控制器
FIT-GS UItra(开发者版)全身外骨骼机器人集成了傲鲨智能自主研发的先进智能数字驱动器,实现一体模块化减速系统和自适应智能运动控制系统,结合傲鲨智能独特的软件力学阻抗,自学习自适应步态和基于人工智能的运动控制算法和模式识别。
产品实现轻量化模块化的设计与腰部外骨骼的互通转换,柔性足底压力传感阵列双足32通道,髋膝关节独立位置传感器,不低于16bit,可视化的腿部长短调节。为开发者提供一款技术引领且性能卓越的外骨骼机器人解决方案。
功能齐全 开发自由
从内部外骨骼软件到外部应用硬件,全身外骨骼机器人相比下肢更丰富
FIT 落地机核心智能架构

动力单元

足底压力

力阻抗控制

力控集成

数据平台

足底压力

TBG减速

高度调节
支持人体增强,辅助行走,医疗科研等场景

API SDK 功能包

软件语言

通信系统

硬件底层
傲鲨智能独特的力学阻抗软件算法
自学习自适应标准步态
非标准步态和基于人工智能的运动控制算法和模式识别
可定制化的步态曲线
想怎么动 由你决定

自适应力
跟随步态
人工智能运动算法

力阻抗控制
助力软件包
线上控制互动
连续PVT运动控制
自研PVT智能运动算法

扭矩模式控制
有效控制动力大小

髋膝关节电机
控制器PID调整
腿部长度调节结构
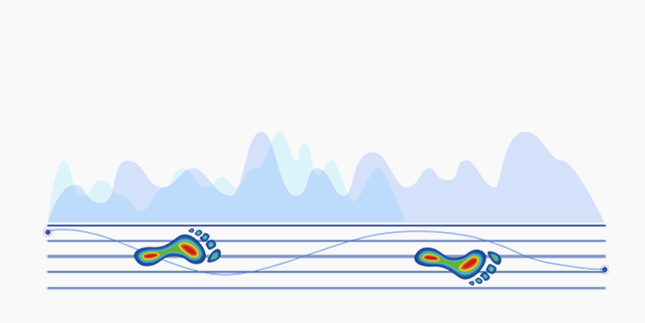
外骨骼机器人通过无线数据实现互联互通
实时获得外骨骼姿态与助力数据,可个性化数据标定
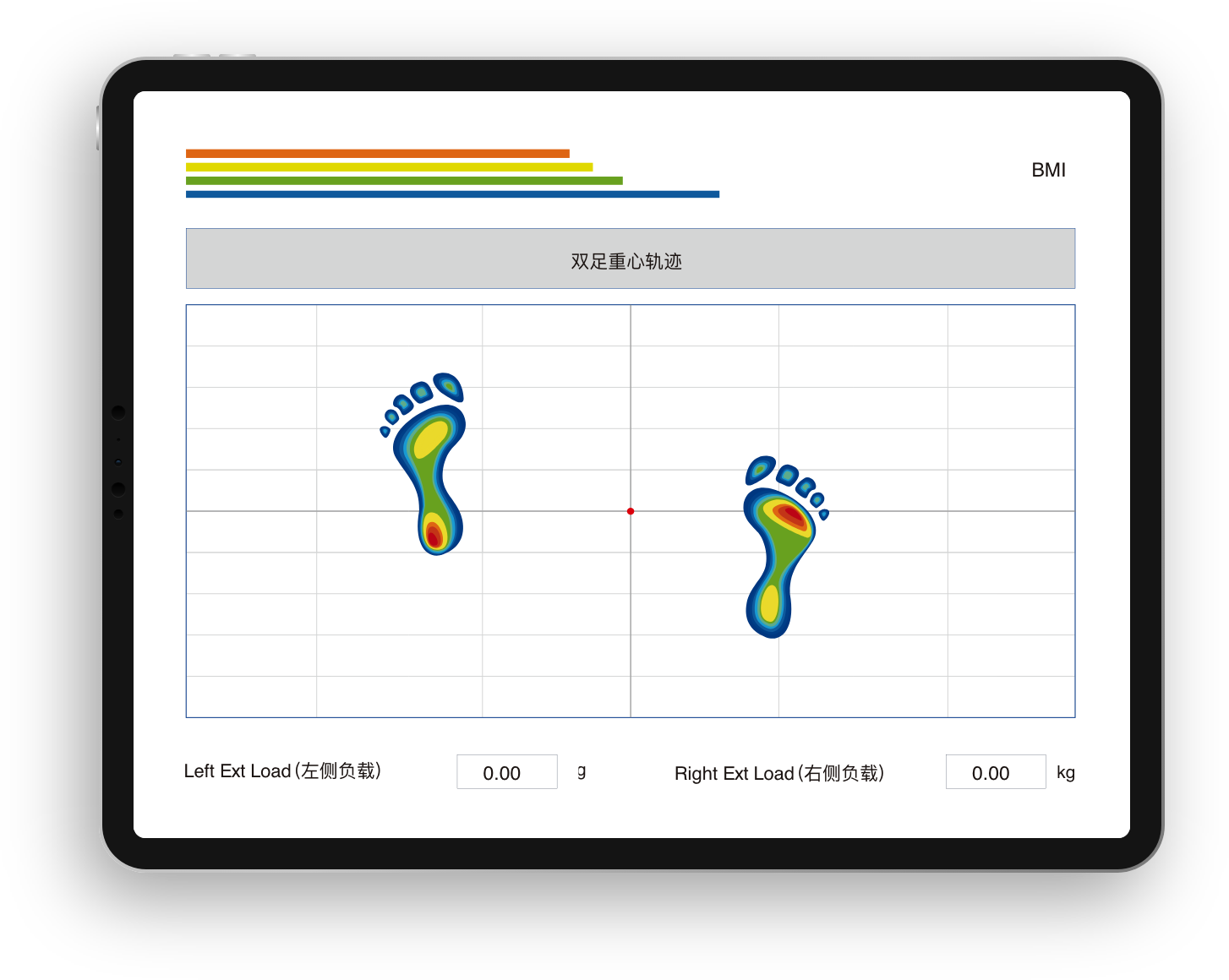
 足底压力数据
足底压力数据
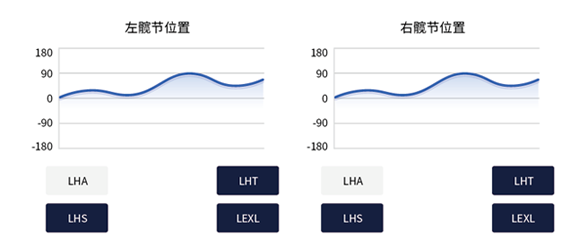
 外骨骼数据曲线
外骨骼数据曲线

 个性化数据标定
个性化数据标定

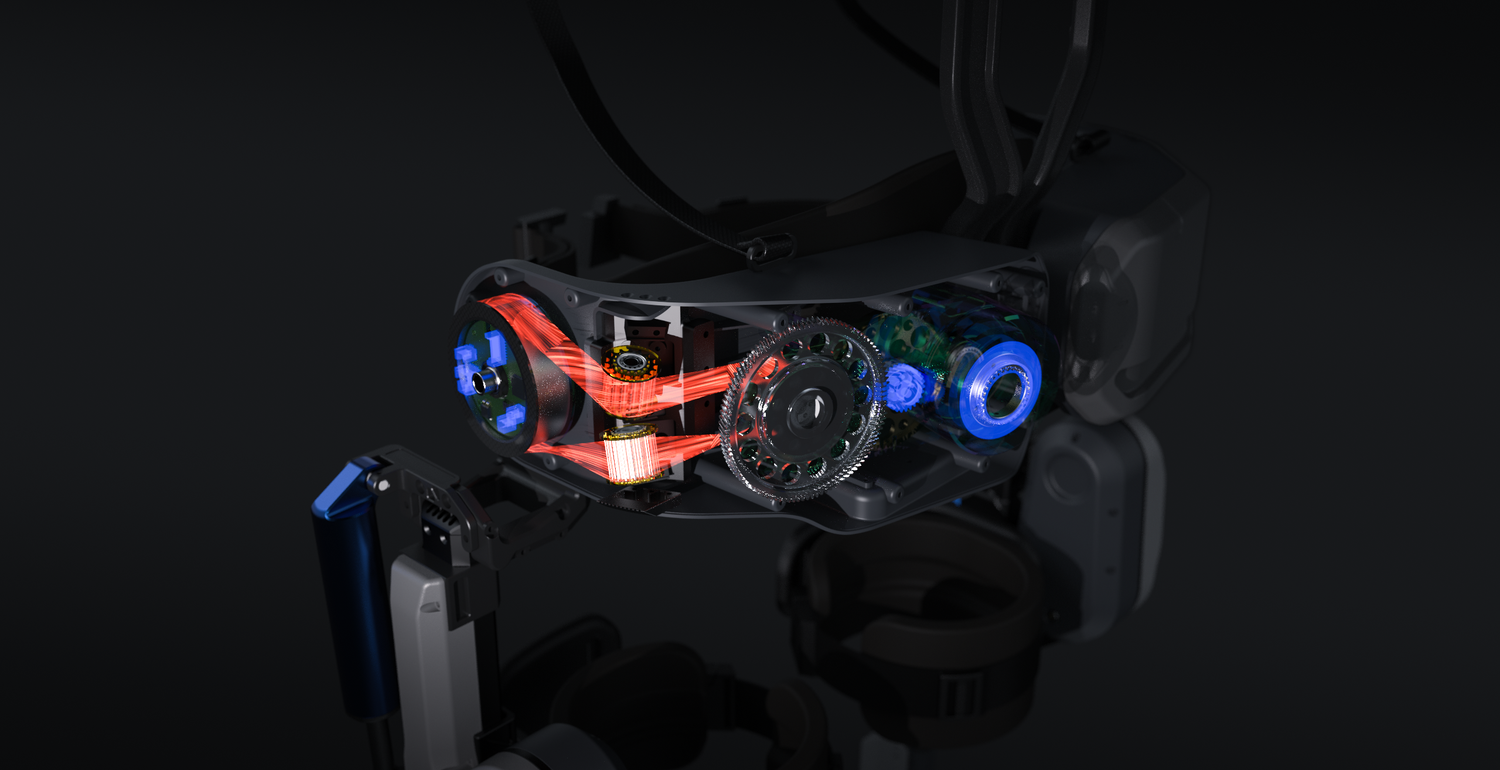
传动系统更新一体化动力隐藏设计外形
更加轻薄有美感
驱控一体低压扭矩型伺服电机系统,集成减速箱
6个主动自由度,10个被动自由度
足底压力数据支持
学术研究

教育教学
医疗研究

康复训练
PARAMETER
综合参数
型号
FIT-GS UItra 全身外骨骼机器人
设备尺寸
750x300x1550(mm) ( 长×宽×高 )
手控器尺寸
102x71x35(mm) ( 长×宽×高 )
设备重量
设备自重<25kg ,包含 1节动力电池
动力源
电助力驱动
身高
160~185cm(支持身高调节)
环境温度
- 20℃~50℃
续航能力
锂电池外包置为可拆卸更换结构,单块电池续航4~6h/电池
电池
锂电池36V
自由度
16个自由度本体,其中6个主动自由度,10个被动自由度
材质
工程塑料,航空铝合金,碳纤维
软件
运动控制软件、嵌入式系统软件、实时离散总线系统软件
足底压力
32通道足底压力数据支持
驱动单元
驱控一体低压扭矩型伺服电机系统,集成减速箱

